2024-08-13 12:07:04
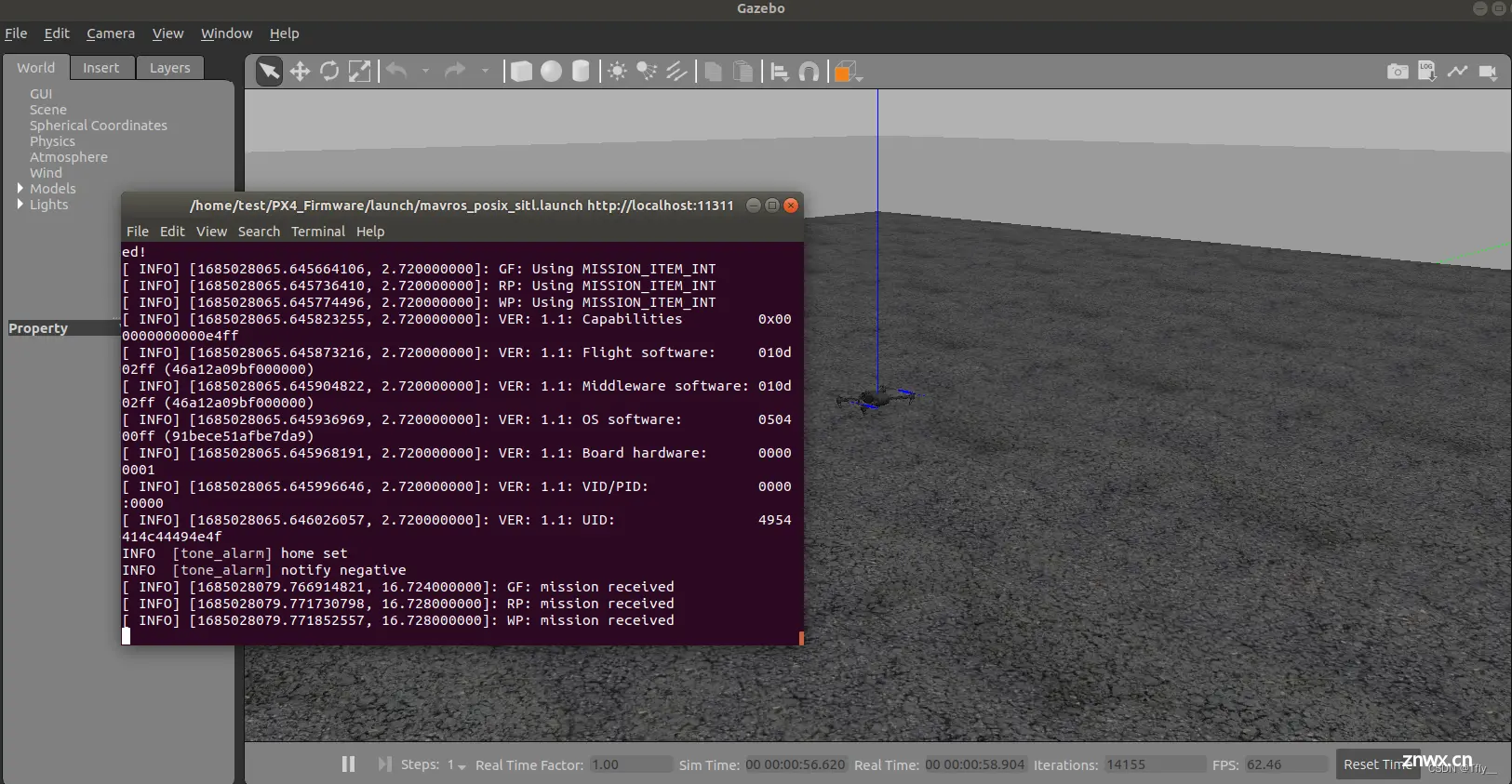
该文详细介绍了如何在Ubuntu18.04上搭建PX4v1.13.2的无人机仿真环境,包括安装ROSMelodic、MAVROS、QGC,以及配置和编译PX4源码,使用gazebo进行仿真测试。过程中涉及依赖安...
浏览 85 次 标签: (最新)ubuntu搭建PX4无人机仿真环境(4) ——仿真环境搭建(以Ubuntu 18.04 ROS1 Melodic 为例)
阅读排行
- 姜青黎靳寒夜尤念笙无删减(我真的陪他淋过大雨姜青黎:结局+番外)全文免费阅读无弹窗大结局_姜青黎靳寒夜尤念笙完本小说全章节阅读(我真的陪他淋过大雨姜青黎:结局+番外)
- 姜青黎靳寒夜尤念笙已完结(我真的陪他淋过大雨姜青黎:结局+番外)全文免费阅读无弹窗大结局_姜青黎靳寒夜尤念笙小说全文在线阅读(我真的陪他淋过大雨姜青黎:结局+番外)
- 我真的陪他淋过大雨姜青黎靳寒夜:全文+番外下载阅读_(姜青黎靳寒夜)我真的陪他淋过大雨姜青黎靳寒夜全文+番外最新章节列表_笔趣阁(姜青黎靳寒夜)
- 祝南音贺祁临肖薇小说(网恋失败后我成了全网白月光祝南音:结局+番外)免费全文全章节阅读_祝南音贺祁临肖薇大结局小说全文免费阅读(网恋失败后我成了全网白月光祝南音:结局+番外)
- (番外)+(全文)姜青黎靳寒夜(我真的陪他淋过大雨小说:结局+番外)全文免费阅读无弹窗大结局_(姜青黎靳寒夜)最新章节列表_笔趣阁(我真的陪他淋过大雨小说:结局+番外)
- (番外)+(全文)姜青黎靳寒夜(我真的陪他淋过大雨免费:结局+番外)全文免费阅读无弹窗大结局_(姜青黎靳寒夜)最新章节列表_笔趣阁(我真的陪他淋过大雨免费:结局+番外)
- (番外)+(全文)姜青黎靳寒夜(我真的陪他淋过大雨:结局+番外)全文免费阅读无弹窗大结局_(姜青黎靳寒夜)最新章节列表_笔趣阁(我真的陪他淋过大雨:结局+番外)
- 我真的陪他淋过大雨:结局+番外(姜青黎靳寒夜)全文免费阅读无弹窗大结局_(我真的陪他淋过大雨:结局+番外姜青黎靳寒夜)最新章节列表_笔趣阁(姜青黎靳寒夜)
- (番外)+(全文)我真的陪他淋过大雨:前言+后续全文免费阅读无弹窗大结局_(我真的陪他淋过大雨后续+完结)我真的陪他淋过大雨后续+完结最新章节列表_笔趣阁(姜青黎靳寒夜)
热门文章
- 祝南音贺祁临肖薇(网恋失败后我成了全网白月光祝南音:结局+番外)全文免费阅读无弹窗大结局_祝南音贺祁临肖薇最新章节列表_笔趣阁(网恋失败后我成了全网白月光祝南音:结局+番外)
- 祝南音贺祁临肖薇(网恋失败后我成了全网白月光祝南音:结局+番外)小说完结版阅读大结局_祝南音贺祁临肖薇全章节最新阅读(网恋失败后我成了全网白月光祝南音:结局+番外)
- 姜青黎靳寒夜尤念笙小说完整(我真的陪他淋过大雨姜青黎:结局+番外)全文免费阅读无弹窗大结局_姜青黎靳寒夜尤念笙最新章节列表_笔趣阁(我真的陪他淋过大雨姜青黎:结局+番外)
- (番外)+(全文)姜青黎靳寒夜尤念笙小说免费下载阅读_(我真的陪他淋过大雨姜青黎:结局+番外)姜青黎靳寒夜尤念笙最新章节列表_笔趣阁(我真的陪他淋过大雨姜青黎:结局+番外)
- 我真的陪他淋过大雨小说:结局+番外(姜青黎靳寒夜)全文免费阅读无弹窗大结局_(我真的陪他淋过大雨小说:结局+番外)最新章节列表_笔趣阁(姜青黎靳寒夜)
- 我真的陪他淋过大雨:结局+番外(姜青黎靳寒夜)书荒宝藏热文必读推荐(姜青黎靳寒夜)全文免费阅读无弹窗大结局_我真的陪他淋过大雨:结局+番外最新章节列表_笔趣阁(姜青黎靳寒夜)
- 情瘾:结局+番外(情瘾:结局+番外)全文免费阅读无弹窗大结局_(关璃周彦阅读无弹窗)关璃周彦列表_笔趣阁(情瘾:结局+番外)
- (番外)+(全文)我真的陪他淋过大雨 宝藏全文阅读_小说免费阅读火爆小说姜青黎靳寒夜推介我真的陪他淋过大雨免费阅读我真的陪他淋过大雨结局+番外(姜青黎靳寒夜)全文在线阅读无弹窗大结局
- (番外)+(全文)我真的陪他淋过大雨:全文+后续:免费阅读无弹在线阅读_姜青黎靳寒夜我真的陪他淋过大雨最新章节免费在线阅读_我真的陪他淋过大雨:全文+后续小说笔趣阁全本_我真的陪他淋过大雨:全文+后续无删减版在线阅读_姜青黎靳寒夜全文完结免费阅读
名师推荐
- 姜青黎靳寒夜尤念笙txt(我真的陪他淋过大雨姜青黎:结局+番外)全文免费阅读无弹窗大结局_姜青黎靳寒夜尤念笙最新章节无删减阅读(我真的陪他淋过大雨姜青黎:结局+番外)
- (番外)+(全文)我真的陪他淋过大雨:结局+番外免费阅读无弹窗大结局姜青黎靳寒夜_(我真的陪他淋过大雨结局+番外)我真的陪他淋过大雨结局+番外最新章节列表_笔趣阁(姜青黎靳寒夜)
- 祝南音贺祁临肖薇下载已完结(网恋失败后我成了全网白月光祝南音:结局+番外)全文小说免费阅读_祝南音贺祁临肖薇全章节小说目录阅读(网恋失败后我成了全网白月光祝南音:结局+番外)
- 我真的陪他淋过大雨txt:结局+番外(姜青黎靳寒夜)全文免费阅读无弹窗大结局_我真的陪他淋过大雨txt:结局+番外最新章节列表_笔趣阁(姜青黎靳寒夜)
- 萧子延穆青青全文(去时惹尘埃,归来月犹在:结局+番外)在线完结版小说阅读_萧子延穆青青全本列表免费笔趣阁(去时惹尘埃,归来月犹在:结局+番外)
- (番外)+(全文)我真的陪他淋过大雨全章+番外(姜青黎靳寒夜)全文免费阅读无弹窗大结局_我真的陪他淋过大雨全章+番外最新章节列表_笔趣阁(我真的陪他淋过大雨:全文+后续+结局)
- 我真的陪他淋过大雨:全文+后续(姜青黎靳寒夜)完结阅读无弹窗大结局_我真的陪他淋过大雨:全文+后续免费阅读最新章节列表_笔趣阁(姜青黎靳寒夜)
- (番外)+(全文)我真的陪他淋过大雨姜青黎靳寒夜小说无删(姜青黎靳寒夜)小说全集畅享在线+清爽版结局姜青黎靳寒夜小说免费下载阅读_(我真的陪他淋过大雨:结局+番外)姜青黎靳寒夜最新章节列表_笔趣阁(我真的陪他淋过大雨:结局+番外)
- 我真的陪他淋过大雨免费:结局+番外(姜青黎靳寒夜)全文免费阅读无弹窗大结局_(我真的陪他淋过大雨免费:结局+番外)最新章节列表_笔趣阁(姜青黎靳寒夜)